米兰官网-论文投稿150天即登顶刊,类人“灵巧手”迎重大突破—新闻—科学网
2026-05-06 01:18:07
999+
公司动态
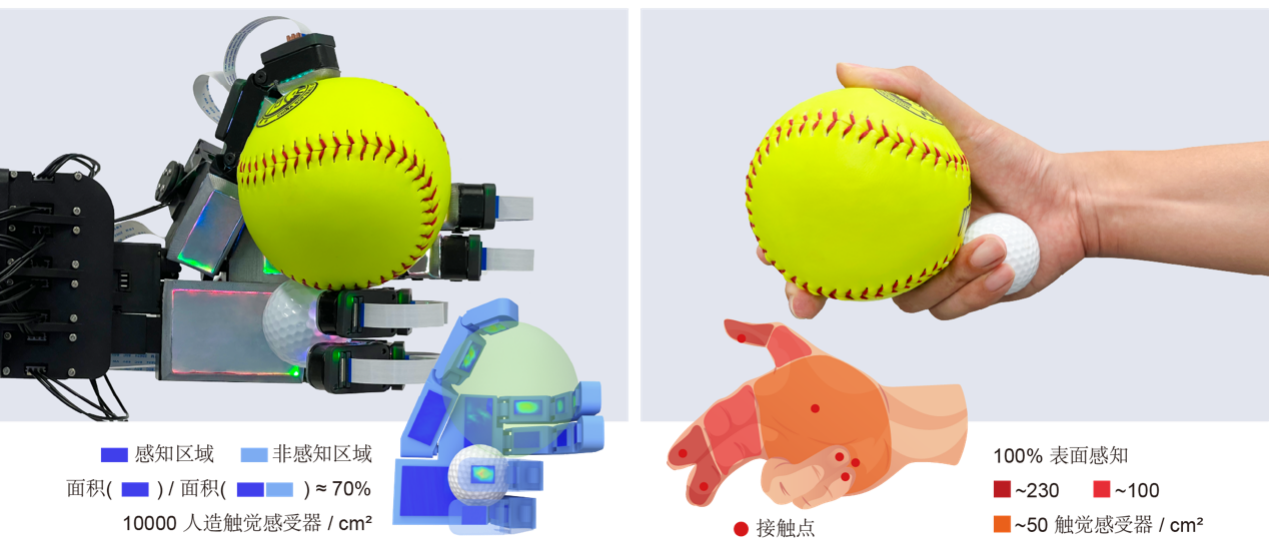
蛇年春节,有两件事儿让于家过年的北京年夜学人工智能研究院助理传授朱毅鑫喜上眉梢:一是DeepSeek异军崛起;二是他们圣诞节前投出的“灵巧手”的论文早早收到了审稿定见,出人意表地顺遂。 审稿人也不惜给出高度评价:“这一结果对于呆板人及整小我私家机交互范畴都有着主要孝敬。” “稳了。”朱毅鑫心想,这项冬眠3年多的研究终究要表态了。 他们干患上是一件顶难的事儿:让呆板人拥有一双无需报酬把持、又能像人手那样拥有矫捷操作能力的手。朱毅鑫告诉《中国科学报》:“(机械手)能像人手同样于不确定情况中连结高效矫捷的操作能力,这对于呆板人于家庭、医疗及工业情况中的运用至关主要。” 6月9日,朱毅鑫团队结合北京年夜学武汉人工智能研究院、北京通用人工智能研究院、北京年夜学工学院及伦敦玛丽皇后年夜学等团队互助的这项结果——“高分辩率触觉感知呆板手实现类人顺应性抓取”,于线发表在《天然—呆板智能》(Nature Machine Intelligence)。 ? 灵感就来历在人手 假如于手指涂上可以阻断触觉的麻药,你会发明连拿起水杯如许简朴的操作,都变患上异样坚苦。 “一样平常手部的动作之以是觉得很简朴,是由于强烈依靠了触觉。”朱毅鑫告诉记者,人的手部布局繁杂,功效也极其周详,由27块骨骼及34块肌肉构成,提供了24个自由度的矫捷性,“是以,对于人类手部功效的研究是具身智能与呆板人学科研的前沿。” 于拿取物体时,人手会阐扬“触觉反馈”及“运动功效”两年夜能力:触觉反馈包罗经由过程肌肉、肌腱及枢纽关头感知气力的运动觉,以和经由过程皮肤感知接触状况、纹理、温度、磨擦力等物理特征的皮肤触觉;而运动功效则蕴含着与枢纽关头角度、位置和其运动之间瓜葛的运动学,以和实现精准运动节制的动力学。 既然手部的触觉云云主要,那何不让呆板手既有运动能力、又有触觉? 他们不是第一个想到这些的。但于以往的研究中,触觉反馈与运动能力的整合,一直是呆板人研究范畴中的庞大挑战。 一来,触觉传感器的引入,会对于呆板人的运动矫捷性造成显著影响;二来,即便得到了具有高分辩率触觉感知能力的机械手,怎样高效地处置惩罚年夜量触觉数据,并以此驱动每一个枢纽关头协同运动、使其于高自由度空间中像人手同样完成抓取等使命,一样是个“拦路虎”。 这也恰是研究团队“秀操作”的部门。 朱毅鑫告诉《中国科学报》,受开导在人类手部的生物布局,他们设计开发了“基在全手触觉的呆板人仿外行”(F-TAC Hand),简称其为“全触手”。全触手的过人的地方,就于在它经由过程传感器与布局一体化设计“乐成冲破了这一瓶颈”。 全触手,它有哪些精良的设计? ? 巧思妙想让机械手“有触觉并自顺应抓取” 扼要来讲,人类手部触觉体系由两个要害要素构成——遍布皮肤的密集触觉传感器阵列及年夜脑皮层中专门处置惩罚及注释这些海量感知输入的神经处置惩罚机制。 “咱们的全触手模仿了这类设计。”论文第一作者、北京年夜学人工智能研究院博士生赵秭杭向《中国科学报》先容说,他们将17个高分辩率触觉传感器、以6种差别配置集成于一路,并将其笼罩于五指机械手除了“枢纽关头”外所有的区域,让机械手拥有了能感知物体巨细、硬度等物理性子的指尖、指腹及手掌。 赵秭杭说,高分辩率触觉传感器笼罩了呆板人手掌外貌70%的区域,空间分辩率到达0.1毫米,“相称在每一平方厘米约有一万个触觉像素,让呆板人也能举行切确操作及顺应性抓取”。 ? F-TAC Hand与人手比力。课题组供图 那末,机械手的顺应性抓取能力,是从哪儿冒出来的? 奥秘藏于细节里。朱毅鑫告诉记者,团队于每一个触觉传感器前都放置有一层薄膜及一台微型高速摄像机,这让其能“看到”动作的细微变化——当机械手能“看到”本身的操作,它也就能按照环境调解本身的抓取计谋。 固然离不开算法的助攻。论文配合第一作者、一年级博士生的李宇飏向《中国科学报》注释道,他们基在几率模子开发了一种天生人类多样化抓取计谋的算法,涵盖了人类常见的19种抓取类型。于抓取天生算法的加持下,机械手就像拥有了一个包罗多样化计谋的“仿单”,为它提供了富厚的抓取选择。 “除了了夹持单一物体外,全触手还有能经由过程全手高分辩率触觉,提早预判多物体抓取时因履行偏差致使的物体碰撞危害,并和时调解运动计谋。”李宇飏说,于实际情况中检测到此类危害时,全触手能于约100毫秒内感知环境并快速切换到替换计谋。 “咱们的算法撑持了全触手纯熟地履行从经常使用的‘气力抓取’到‘更邃密的精准抓取’等多种抓取动作类型。”李宇飏对于记者暗示。 值患上一提的是,于总体设计中,还有有一个巧妙构想贯串此中:他们将传感器设计为“既是感知元件又是布局部件”,从而于不捐躯矫捷性的条件下,实现了史无前例的触觉笼罩规模。赵秭杭告诉记者,所有的这些设计保障了全触手可以或许像人类手掌同样,于抓取历程中及时感知接触变化并迅速调解,将极年夜晋升机械手于不确定情况中的操作不变性。 据团队先容,于600次真实世界的试验数据显示,比拟没有触觉反馈的体系,全触手的多物体抓取平均乐成率从53.5%晋升至了100%。 ? F-TAC Hand抓握两个物体。课题组供图 ? F-TAC Hand及时高分辩触觉感知能力。课题组供图 圣诞节加急送审 据相识,朱毅鑫团队这项结果是有研究记载以来,国际上首个同时具有全手高分辩率触觉感知及完备运动能力的呆板人手体系。 也许也正因云云,以该结果为主体的论文审视速率之快,凌驾了朱毅鑫的想象。 时针拨回到2024年12月16日,朱毅鑫点下邮件的发送键。原以为能轻松一阵,没想到不久后他们就收到答复:“论文已经被送审”。 “由于恰巧赶于西方圣诞节前夜,咱们估计圣诞节后才会送审,没想到论文被加急送审,圣诞节前就收到了送审动静。”朱毅鑫边口算边说:“去失两个假期,相称在130天论文就确定被吸收了。” 朱毅鑫认为,他们的研究不仅是技能上的冲破,更为理解智能的素质提供了全新视角。 “人类智能深植根在身体的感知能力,特别是手部的触觉体验对于咱们认知世界至关主要。”朱毅鑫说,“全触手的结果注解,富厚的感知能力对于在呆板智能的成长一样不成或者缺。” 最近几年来,以年夜语言模子为代表的基在数据练习及推理的人工智能取患了显著前进,但于真实世界中,呆板人的感知及交互能力还有存于诸多不足。 “我一直有一个方针,就是想让呆板人变患上更智能,更泛化。”赵秭杭告诉记者,他从小就对于呆板人有着稠密兴致,本科的电机工程专业又为其打下优良的基础,“我一直于思索怎样提高呆板人的交互能力,要想实现及物体、情况的交互,至少需要一个闭环的反馈体系,而触觉就提供了呆板人与物体交互状况的直接反馈。” 但要把设法酿成实际,注定要蜕几层皮、遭几遭罪。赵秭杭分享了一个小“变乱”:疫情时期,研究进度一度弃捐,一件小事就变成年夜祸——试验室没人开空调,零下十几度的气候直接冻裂了传感器…… 这倒没太冲击到他:“我喜欢做机械设计,也信赖只管有坚苦,但只要按预期一点点地推进,就会实现方针。” 本科卒业在清华“通班”的李宇飏,有一顶智慧的脑壳及一种随时“自洽”的人生立场。他于通班与导师朱毅鑫结缘,卒业后就随着后者攻读博士学位,主攻呆板人及三维视觉范畴。选择做科研,他只有一句话: “或许到不了‘无人之境’,但我要出发了。” 李宇飏是那种性格比力内向、喜欢享受独处的人,他自认本身是“情绪不变的卡皮巴拉”。做全触手这项课题,他感觉这是一件很酷的事:“以呆板人手用筷子为例,我但愿将来它不仅能捉住一双筷子,更能用筷子夹起其他物体,相称在呆板手能利用东西举行抓取,这就很酷。” 朱毅鑫一直说,这项结果基在以往的科研堆集、从已往4年的开发而来,但他感觉它代表着呆板人以致通用人工智能的将来。 “将来咱们将继承深化触觉感知与呆板人节制的联合,摸索越发智能的体感交互范式,为实现真正意义上的通用人工智能奠基基础。”朱毅鑫说。 记者趁便问了一下,朱毅鑫课题组团队成员平均春秋只有不到25岁。那没错了,他们代表着将来。 相干论文信息:https://doi.org/10.1038/s42256-025-01053-3  朱毅鑫(右1站立者)、赵秭杭(左一)、李宇飏(左二)于受访中。赵广立 摄
朱毅鑫(右1站立者)、赵秭杭(左一)、李宇飏(左二)于受访中。赵广立 摄  全触手。课题组供图
全触手。课题组供图